




ໃນອຸດສາຫະກໍາປຸງແຕ່ງອາຫານ, ອຸດສາຫະກໍາການພິມ, ອຸດສາຫະກໍາແຜ່ນແພແລະອຸດສາຫະກໍາການຜະລິດອື່ນໆ, ມີປະກົດການທີ່ຂະບວນການຜະລິດແມ່ນຂຶ້ນກັບການຄວບຄຸມຄວາມກົດດັນ.ຄວາມເຄັ່ງຕຶງແມ່ນແຮງດຶງຫຼືຄວາມກົດດັນທີ່ນໍາໃຊ້ກັບວັດສະດຸ, ເຊິ່ງເຮັດໃຫ້ວັດສະດຸ stretch ໃນທິດທາງຂອງຜົນບັງຄັບໃຊ້.ເມື່ອຄວາມກົດດັນຂະຫນາດໃຫຍ່ເກີນໄປ, ຄວາມເຄັ່ງຕຶງທີ່ບໍ່ເຫມາະສົມຈະເຮັດໃຫ້ວັດສະດຸຍືດຍາວ, ແຕກແລະທໍາລາຍຮູບຮ່າງຂອງມ້ວນ.ຖ້າຄວາມກົດດັນເກີນຄວາມທົນທານຂອງວັດສະດຸ, ມັນກໍ່ຈະເຮັດໃຫ້ມ້ວນເສຍຫາຍ.ຄວາມກົດດັນທີ່ບໍ່ພຽງພໍຍັງຈະເຮັດໃຫ້ drum winding stretch ຫຼື sag, ສົ່ງຜົນໃຫ້ຜະລິດຕະພັນສໍາເລັດຮູບທີ່ບໍ່ດີ.
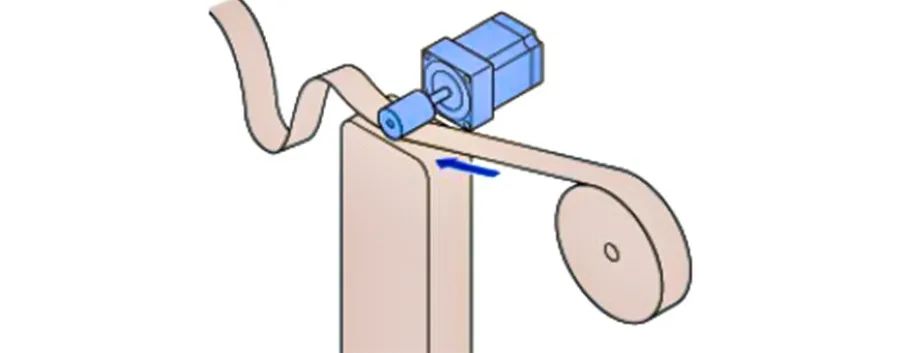
ການຄວບຄຸມຄວາມກົດດັນທີ່ດີສາມາດຮັບປະກັນຄຸນນະພາບຂອງຜະລິດຕະພັນແລະປັບປຸງປະສິດທິພາບການຜະລິດ.ຢ່າງໃດກໍຕາມ, ສໍາລັບຜູ້ຜະລິດ, ການຄັດເລືອກແລະການນໍາໃຊ້ລະບົບການຄວບຄຸມຄວາມກົດດັນແມ່ນມີຄວາມຫຍຸ້ງຍາກຫຼາຍ.ໃນດ້ານຫນຶ່ງ, ມັນເປັນການຍາກທີ່ຈະເລືອກເອົາປະເພດ, ອົງປະກອບຂອງການຄວບຄຸມການເຄື່ອນໄຫວຄວາມກົດດັນແມ່ນສະລັບສັບຊ້ອນ, ແລະການຄວບຄຸມຄວາມກົດດັນທີ່ຕ້ອງການໂດຍອຸດສາຫະກໍາທີ່ແຕກຕ່າງກັນແມ່ນແຕກຕ່າງກັນ, ແລະການເລືອກປະເພດແມ່ນໃຊ້ເວລາຫຼາຍ, ແຮງງານແລະຄ່າໃຊ້ຈ່າຍ.ໃນອີກດ້ານຫນຶ່ງ, ມັນເປັນການຍາກທີ່ຈະສະຫມັກຂໍເອົາແລະ debug, ແລະວິສະວະກອນມີຄວາມຕ້ອງການດ້ານວິຊາການສູງເພື່ອປະສົມປະສານແລະ debug ພາກສ່ວນທັງຫມົດຂອງລະບົບ servo ຄວບຄຸມຄວາມກົດດັນ.ເພື່ອແກ້ໄຂຄວາມຫຍຸ້ງຍາກໃນການນໍາໃຊ້ການຄວບຄຸມຄວາມກົດດັນໃນອຸດສາຫະກໍາຕ່າງໆ, Vicoda ໄດ້ເປີດຕົວການແກ້ໄຂລວມຂອງການຄວບຄຸມຄວາມກົດດັນ.

ການແກ້ໄຂໂດຍລວມສໍາລັບການຄວບຄຸມຄວາມກົດດັນ
ການແກ້ໄຂໂດຍລວມຂອງການຄວບຄຸມຄວາມກົດດັນແມ່ນການແກ້ໄຂພິເສດທີ່ພັດທະນາ, ປັບແຕ່ງແລະປະສົມປະສານສໍາລັບສະຖານະການຄວບຄຸມການເຄື່ອນໄຫວຂອງການຄວບຄຸມຄວາມກົດດັນ.ມັນປະກອບມີໄດເວີ servo ພິເສດສໍາລັບການຄວບຄຸມຄວາມເຄັ່ງຕຶງ, ເຊັນເຊີຄວາມເຄັ່ງຕຶງ, ການໂຕ້ຕອບຂອງມະນຸດ - ເຄື່ອງ, ແລະປະສົມປະສານຕົວຄວບຄຸມຄວາມກົດດັນເຂົ້າໄປໃນ servo driver.ໃນສັ້ນ, ການແກ້ໄຂໂດຍລວມຂອງການຄວບຄຸມຄວາມກົດດັນແມ່ນການຫຸ້ມຫໍ່ການດໍາເນີນງານແລະອົງປະກອບການຄວບຄຸມທີ່ຈໍາເປັນສໍາລັບການຄວບຄຸມຄວາມເຄັ່ງຕຶງ, ແລະປັບແຕ່ງແລະເພີ່ມປະສິດທິພາບໃຫ້ເຂົາເຈົ້າຕາມລັກສະນະຂອງການຄວບຄຸມຄວາມກົດດັນ.
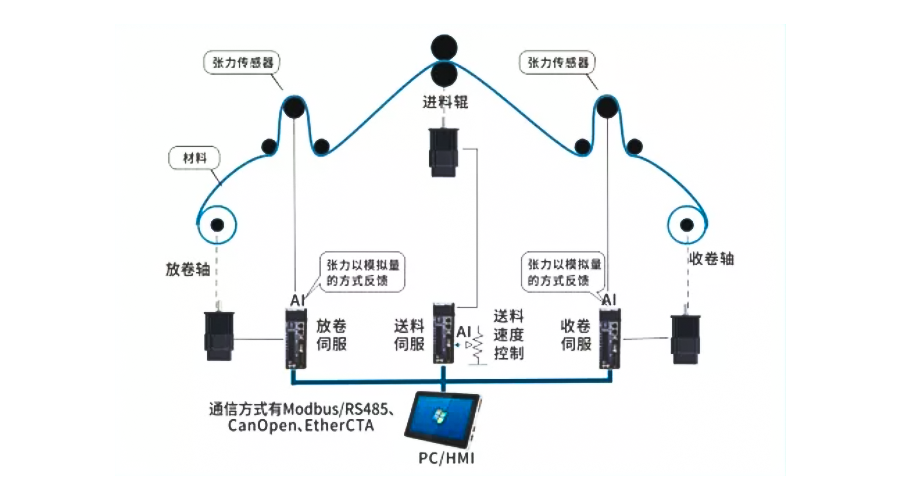
ໂດຍອີງໃສ່ປະສົບການຫຼາຍປີຂອງການຄົ້ນຄວ້າແລະຄໍາຮ້ອງສະຫມັກໃນລະບົບ servo ແລະການຄວບຄຸມການເຄື່ອນໄຫວ, Vecta ໄດ້ເປີດຕົວການແກ້ໄຂການຄວບຄຸມຄວາມກົດດັນໂດຍລວມສໍາລັບການຄວບຄຸມຄວາມກົດດັນ winding ແລະການຄວບຄຸມຄວາມເຄັ່ງຕຶງຂອງຂະບວນການທີ່ຕ້ອງການໂດຍຂະບວນການຜະລິດທັງຫມົດ, ລວມທັງອົງປະກອບດັ່ງຕໍ່ໄປນີ້:
一, servo ພິເສດສໍາລັບຄວາມກົດດັນ
ໄດເວີ servo ພິເສດມີໂຫມດຄວາມໄວຂອງວົງປິດໃນຕົວ, ໂຫມດແຮງບິດຂອງວົງປິດ, ໂຫມດຄວາມໄວຮອບເປີດແລະໂຫມດ torque ເປີດ.ໂດຍບໍ່ມີການດໍາເນີນໂຄງການເພີ່ມເຕີມ, ຮູບແບບການຄວບຄຸມຄວາມກົດດັນທີ່ແຕກຕ່າງກັນສາມາດໄດ້ຮັບການຮັບຮອງເອົາສໍາລັບເຄື່ອງຈັກທີ່ແຕກຕ່າງກັນ, ເຊັ່ນ: ການຄວບຄຸມຄວາມກົດດັນເປີດ loop ຂອງ winding, ການຄວບຄຸມຄວາມກົດດັນວົງປິດຂອງ winding, ການຄວບຄຸມຄວາມກົດດັນຂະບວນການ, ແລະອື່ນໆ, ເພື່ອບັນລຸຜົນກະທົບຂອງຄວາມຖືກຕ້ອງສູງ, ຄວາມຫມັ້ນຄົງສູງ. , ບໍ່ມີການບໍາລຸງຮັກສາແລະການປະຫຍັດພະລັງງານ.

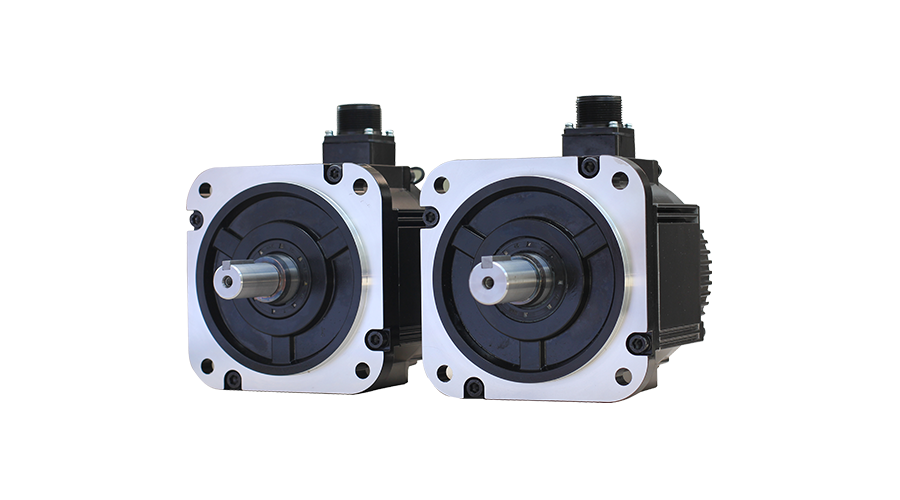
二、 ມໍເຕີເຊີໂວ
ມໍເຕີ servo ຖືກຄວບຄຸມໂດຍຄົນຂັບ servo.ການແກ້ໄຂໂດຍລວມຂອງການຄວບຄຸມຄວາມເຄັ່ງຕຶງຂອງ VEKODA ຈະເລືອກແລະ debug motor ລ່ວງຫນ້າຕາມສາມອົງປະກອບຂອງ torque, inertia ແລະ linear speed motor ການຄັດເລືອກລະບົບ, ແລະຫຸ້ມຫໍ່ມັນໃຫ້ກັບຜູ້ໃຊ້ທັງຫມົດ, ເພື່ອຫຼີກເວັ້ນການຄວາມກັງວົນຂອງຜູ້ໃຊ້. ກ່ຽວກັບການເລືອກມໍເຕີ.
三、ເຊັນເຊີ
ສ່ວນເຊັນເຊີປະກອບມີເຊັນເຊີຄວາມເຄັ່ງຕຶງແລະເຊັນເຊີ ultrasonic.ເມື່ອຮູບແບບການຄວບຄຸມແບບວົງປິດຖືກໃຊ້, ປະເພດລູກກິ້ງລອຍຫຼືເຊັນເຊີປະເພດຄວາມກົດດັນຖືກນໍາໃຊ້ເພື່ອທົບທວນຄວາມກົດດັນໃນປະຈຸບັນ.ຄວນສັງເກດວ່າປະລິມານການປຽບທຽບຕ້ອງໄດ້ຮັບການປັບຕາມເຊັນເຊີກ່ອນທີ່ຈະໃຊ້.ໃນເວລາທີ່ອຸປະກອນການແກ້ໄຂ deviation ຖືກນໍາໃຊ້, ເຊັນເຊີ ultrasonic ແມ່ນຈໍາເປັນເພື່ອຮັບຮູ້ຕໍາແຫນ່ງຂອງອຸປະກອນການ coil ຜ່ານ ultrasonic, ຄວບຄຸມການເຄື່ອນໄຫວຂອງ shaft unwinding ຫຼື winding ໄປຂ້າງຫນ້າແລະກັບຄືນໄປບ່ອນ, ແລະຮັບປະກັນວ່າຕໍາແຫນ່ງຂອງອຸປະກອນການ coil ບໍ່ deviate. .
四, ໜ້າຈໍການໂຕ້ຕອບມະນຸດ-ຄອມພິວເຕີ
ຫນ້າຈໍການໂຕ້ຕອບຂອງມະນຸດກັບຄອມພິວເຕີສ່ວນໃຫຍ່ຖືກນໍາໃຊ້ເພື່ອກໍານົດພາລາມິເຕີສໍາລັບໄດເວີ (ເຊັ່ນ: ມູນຄ່າການຕັ້ງຄ່າຄວາມກົດດັນ, ຕົວກໍານົດການທີ່ກ່ຽວຂ້ອງກັບເສັ້ນໂຄ້ງ, ແລະອື່ນໆ), ຄວບຄຸມໄດເວີເພື່ອເປີດໃຊ້, ແລ່ນແລະກັບຄືນໄປຫາຫນ້າທີ່ຕົ້ນສະບັບ, ແລະຟັງຊັນການຕິດຕາມການຊ່ວຍເຫຼືອ. .

ໃນທັດສະນະຂອງບັນຫາການຄວບຄຸມຄວາມກົດດັນໃນອຸດສາຫະກໍາຕ່າງໆໃນປະຈຸບັນ, Vector ວິເຄາະຫຼັກການການຄວບຄຸມຄວາມກົດດັນແລະລັກສະນະໃນຮູບແບບທີ່ແຕກຕ່າງກັນ, ແລະມີປະສົບການ 18 ປີໃນການຄົ້ນຄວ້າແລະການພັດທະນາແລະການນໍາໃຊ້ອຸດສາຫະກໍາຄວບຄຸມ servo ແລະການດໍາເນີນງານ, ຮັບຮູ້ການຮ່ວມມື seamless ລະຫວ່າງ. ການຄົ້ນຄວ້າແລະການພັດທະນາຜະລິດຕະພັນແລະການນໍາໃຊ້ຜະລິດຕະພັນ, ແລະສະຫນອງການແກ້ໄຂການຄວບຄຸມຄວາມເຄັ່ງຕຶງຂອງຜູ້ໃຫຍ່ແລະເຊື່ອຖືໄດ້ສໍາລັບອຸດສາຫະກໍາທັງຫມົດ!
ເວລາປະກາດ: ວັນທີ 01-01-2023